自動化リノベーションとは
一般社団法人リノベーション協議会では、「リフォーム」と「リノベーション」の違いを以下のように定めています。
| ことば | 意味 |
|---|---|
| リフォーム | 原状回復のための修繕、営繕、不具合箇所への部分的な対処 |
| リノベーション | 機能、価値の再生のための改修。その家での暮らし全体に対処した、包括的な改修 |
製造現場に当てはめると、リフォームが「保守」にあたるもの対して、リノベーションは「魔改造」や 「DX」(トランスフォーメーション)にあたるものと、私たちは捉えています。
CA技研が提案する自動化リノベーションは、『3D、協働ロボット、メカトロ』技術を核に、既存設備を最新の自動化設備にアップデートします。
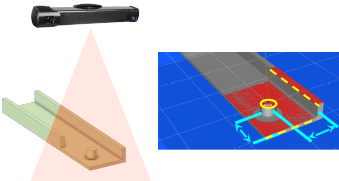
3D技術
2Dセンサー(カメラ)とロボットなどの装置との組み合わせは、従来より行われてきましたが、3Dセンサへの置き換えが広まりつつあります。よって取得される「点群」データを処理し、ワークの「認識」「測位」「寸法計測」を行います。
優位性
- 実寸情報である
2Dセンサーはピクセル情報の出力のため、カメラの取り付け位置だけでなく、撮影の教示位置が変わったり、対象物の配置位置が変わったり、何かを変更するたびキャリブレーションが必要です。
一方、3Dセンサーはピクセルではなく、個々の点の3次元座標を実寸(mm)として得られます。カメラの取り付け時のキャリブレーションさえ行えば、データは実寸として得られるため、その他の変更はキャリブレーションは不要です。 - 外乱光に強い
2Dセンサーは、対象物の濃淡情報(テクスチャ)を処理します。このため対象物に当たる外乱光によって、誤認識が生じます。このため撮影を行うエリアを暗幕で覆うなどの追加工事が発生することが多々見受けられます。 3Dセンサーは、対象物の形状情報(ジオメトリ)を処理するため、外乱光の影響を受けません。
3Dセンサー一覧
現在、市場で入手可能な製品を一覧します。
***********準備中**********
協働ロボット
協働ロボットは、様々な期待と共に市場に現れましたが、なかなか広がりを見せていません。その理由のひとつとして、「用途」と「協働ロボット」がマッチしていない、ことが多々あります。
私共は、協働ロボットでないと成立しない用途の開拓を進めています。
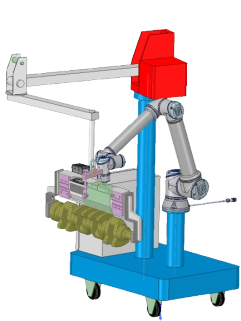
重量物搬送システム
可搬重量を超えるワークを、重量補助装置(バランサー)との協調動作により搬送するシステム。 数10Kgfの重量物をハンドリングするには、中〜大型のロボットが必要になります。従来ヒトが行っていた作業スペースにロボット導入する場合、安全柵の設置スペースが確保できないことが起こり得ます。このようなケースで有効なソリューションです。
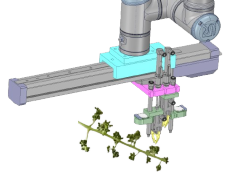
メカトロ
特殊ハンドなど、メカトロ機器の設計・製作を行います。
摘果選定用ハンド
ムービー
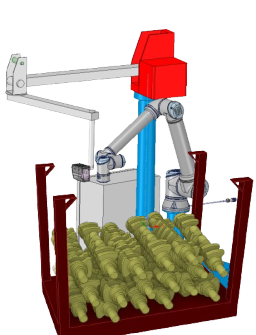
3Dセンサーと協働ロボットによる重量物搬送システム
*******動画公開準備中********